Chaque jour, les pharmacies d’hôpitaux doivent remplir de nombreuses seringues avec des médicaments liquides destinés à être administrés aux patients. La préparation de ces seringues s’effectue manuellement par des employés. Mais ces derniers, à force de répéter les mêmes gestes, développent des problèmes musculosquelettiques. La manipulation des seringues requiert également beaucoup de temps, alors que la main-d’œuvre en pharmacie se fait rare. Et si le remplissage des seringues était plutôt confié à un robot intelligent ? C’est la solution explorée par Louness Khelifi, étudiant à la maîtrise en mathématiques et informatique appliquées à l’UQTR, en partenariat avec l’entreprise québécoise Kobotik et le Centre hospitalier universitaire (CHU) Sainte-Justine.
Depuis près d’un an, Louness Khelifi travaille à développer un système robotisé entièrement autonome qui, une fois en fonction, sera en mesure de remplir précisément et rapidement des seringues orales avec divers médicaments. De grandeur variée, les seringues orales (sans aiguille) sont utilisées en milieu hospitalier pour injecter un médicament liquide dans la bouche d’un patient.

Louness Khelifi, étudiant à la maîtrise en mathématiques et informatique appliquées
« Les techniciens de la pharmacie du CHU Sainte-Justine doivent préparer de 700 à 800 seringues orales par jour. Pour les aider dans cette tâche exigeante, un dirigeant de la pharmacie a demandé à l’entreprise Kobotik, spécialisée en intelligence artificielle et en robotique, de développer une machine capable de remplir les seringues. J’ai pu me joindre à ce projet d’automatisation grâce à mon directeur de recherche, le professeur Usef Faghihi, qui m’a mis en contact avec Kobotik. Nous avons aussi obtenu un financement du programme Mitacs Accélération pour la réalisation de ce projet », explique Louness Khelifi.
Avant de commencer ses travaux, le chercheur d’origine algérienne s’est d’abord assuré de visiter les installations de la pharmacie du CHU Sainte-Justine. Il a pu ainsi prendre connaissance des façons de procéder des employés, de l’organisation de l’espace et des obstacles présents. « Il faut mentionner que notre objectif est de fournir un robot qui respecte les processus en place et ne vient pas imposer de trop grands changements à l’équipe de la pharmacie », souligne-t-il.
Un système intelligent, raffiné dans ses moindres détails
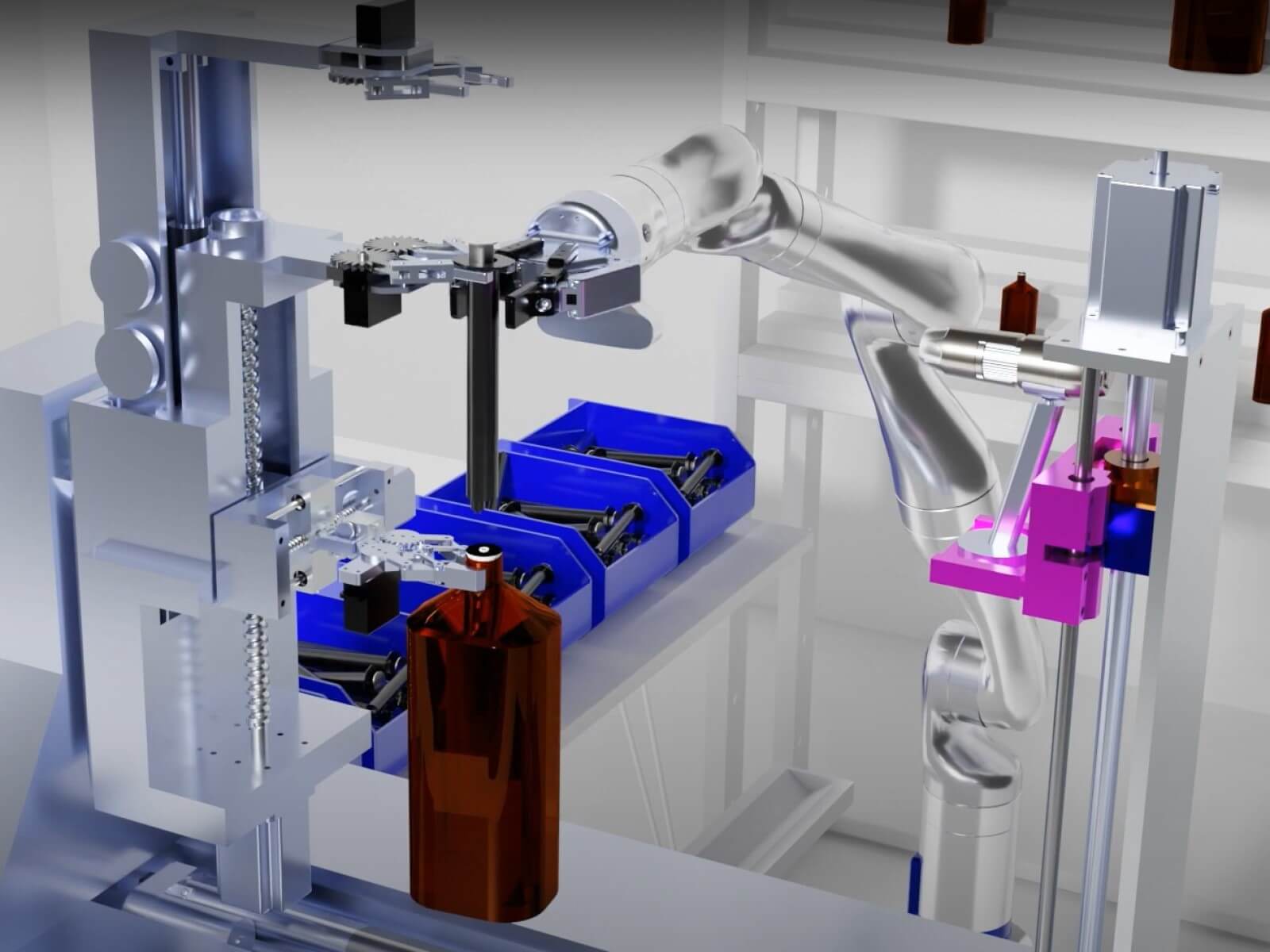
Mettant à profit ses connaissances en intelligence artificielle acquises à l’UQTR, ainsi que son expertise en génie logiciel développée lors de ses études universitaires en Algérie, Louness Khelifi, avec l’aide de Kobotik, a conçu un prototype de robot intelligent qui présente déjà des résultats prometteurs. Voyez ici une illustration virtuelle des actions effectuées par ce système pour le remplissage de seringues, grâce à une vidéo réalisée par l’étudiant lui-même :
Nommé Avicenna 1.0 – en référence au célèbre médecin et philosophe perse Avicenne – le système développé par Louness Khelifi et Kobotik utilise une caméra 3D pour repérer les bouteilles de médicaments liquides disposées sur une étagère de pharmacie. Les renseignements enregistrés par la caméra sont transmis à un serveur informatique, lequel envoie ensuite des instructions à un bras robotisé pour qu’il puisse saisir correctement la bonne bouteille.
« Grâce à un algorithme d’apprentissage par renforcement, nous apprenons à notre système à utiliser la meilleure stratégie pour prendre une bouteille, selon les informations spatiales fournies par la caméra. La période d’essais-erreurs de la machine se déroule d’abord dans un univers uniquement virtuel, pour ne pas abîmer le bras robotisé. Lorsque le système est opérationnel, nous pouvons passer à des tests en contexte réel », indique Louness Khelifi.

Les bouteilles de médicaments servant au remplissage de seringues sont placées sur des étagères telles que celle-ci, au CHU Sainte-Justine.
Une fois qu’il a pris la bouteille de médicaments sur l’étagère et l’a placée dans une pince, le bras robotique saisit une seringue d’un format précis, parmi les seringues de grosseurs différentes disposées dans des bacs. « Le système utilise la caméra et l’intelligence artificielle pour trouver et manipuler la bonne seringue, c’est-à-dire celle qui a été prescrite pour un certain patient de l’hôpital. Un algorithme de classification permet au cerveau informatique du robot de sélectionner une seringue adéquate, à partir de l’image qu’il voit », précise l’étudiant.
Le robot installe ensuite la seringue dans des pinces situées au-dessus de la bouteille de médicaments. Grâce à deux caméras, le système positionne la bouteille au bon endroit afin que la tête de la seringue puisse s’introduire correctement dans le bouchon de la bouteille. Cette dernière est alors retournée (le bouchon en bas) pour permettre à la seringue d’aspirer le liquide.
L’une des caméras, appelée caméra microscope, guide ensuite les manipulations du piston de la seringue, pour extraire le bon volume de liquide de la bouteille. Le système émet aussi des vibrations pour que les bulles d’air se formant dans la seringue remontent en haut de celle-ci et puissent être éliminées en actionnant le piston. La caméra microscope permet de repérer les bulles d’air et peut aussi lire l’étiquette de la seringue, pour confirmer qu’elle est de bon format. Une fois la seringue correctement remplie, celle-ci est à nouveau saisie par le bras robotisé qui la dépose alors à l’endroit souhaité.
Une machine autonome, compatible avec les équipements hospitaliers
Pour savoir quelles bouteilles de médicaments et quelles seringues il doit sélectionner, le système Avicenna 1.0 interroge la base de données des patients du CHU Sainte-Justine. Il sait ainsi combien de seringues de telle grosseur doivent être remplies avec tel médicament, pour répondre aux besoins des patients.
Le robot a aussi été conçu pour minimiser l’intervention des techniciens de la pharmacie, qui devront uniquement placer les bouteilles de médicament sur les étagères et les seringues dans des bacs. Tout le reste du travail de préparation des seringues reviendra au robot. Si un problème survient ou s’il manque de seringues ou de médicaments, une notification sera envoyée aux techniciens. Le robot pourra aussi être contrôlé à distance, pour régler une difficulté.
Un prototype réel en préparation
Le projet de robot intelligent destiné au remplissage de seringues orales est déjà bien avancé. « Nous avons testé le bras robotique KTS de Kobotik et il fonctionne bien, mentionne Louness Khelifi. Tous les algorithmes d’intelligence artificielle servant au contrôle des mouvements et à la détection des bouteilles et des seringues sont prêts. Nous travaillons maintenant sur l’assemblage du robot dans les laboratoires de l’UQTR, avec des pièces qui seront confectionnées par une imprimante 3D. Lorsque le robot sera fonctionnel, nous estimons qu’il pourra remplir une seringue en 40 secondes. Le système pourra aussi travailler 24 heures sur 24, 7 jours sur 7, permettant ainsi de fournir en tout temps les seringues orales nécessaires au traitement des patients. »
L’étudiant-chercheur et l’entreprise Kobotik envisagent déjà d’autres étapes au projet : « Nous prévoyons ajouter une fonction au robot pour apposer une étiquette avec les coordonnées du patient sur les seringues, après le remplissage. Notre système pourrait aussi éventuellement être adapté pour effectuer le remplissage des seringues intraveineuses, qu’il faut manipuler dans un environnement stérile. »

Sélection d’une seringue par le robot Avicenna 1.0
Des partenaires satisfaits
Pour ce projet, Louness Khelifi travaille tout particulièrement en collaboration avec Ronald Bourgeois, président-directeur général de Kobotik, et l’ingénieur en mécatronique/robotique Avanik Donga.
« Les gens de Kobotik sont très contents des résultats obtenus et sont impatients de pouvoir commercialiser ce robot, qui s’avérera utile pour tous les hôpitaux. Du côté du CHU Sainte-Justine, il y a aussi beaucoup d’enthousiasme. Les gens de la pharmacie disent que ce système est très important pour eux. Selon nos estimations actuelles, la version finale du robot serait prête d’ici environ deux ans. Elle pourra alors être implantée au CHU Sainte-Justine. L’équipe de la pharmacie pense même à placer le robot dans une vitrine pour que les gens puissent le voir travailler. Mais pour l’instant, aucun élément de notre système robotisé n’est encore installé sur les lieux », ajoute le jeune chercheur.
Louness Khelifi encourage tous les étudiants à s’impliquer dans ce genre de projet et à faire des efforts autodidactes pour aller au-delà de l’apprentissage universitaire. Il se dit très reconnaissant envers le professeur Usef Faghihi du Département de mathématiques et d’informatique de l’UQTR, qui lui a offert la possibilité de participer activement à ce projet de robot intelligent. Les travaux réalisés ont permis à l’étudiant d’acquérir une expérience précieuse, tout en étant rémunéré.
« Le professeur Faghihi est très dynamique, très accueillant et encourageant, note Louness Khelifi. Le monde des mathématiques pures était un peu intimidant pour moi au début, car je viens du domaine du génie logiciel, mais le professeur Faghihi m’a aidé à m’adapter rapidement. Il m’a intégré dans plusieurs projets de recherche, m’a permis de sortir de ma zone de confort et d’apprendre beaucoup sur l’intelligence artificielle et la causalité, des domaines en plein développement. »
Après ses études à la maîtrise, Louness Khelifi poursuivra son parcours universitaire à l’UQTR dans le programme de doctorat en génie électrique (concentration génie informatique), sous la direction du professeur Faghihi. Ses recherches porteront sur l’intelligence artificielle et un nouvel algorithme d’apprentissage par renforcement.